How the BELL NEXUS Ducted Fans Produce Coordinated Flight Control
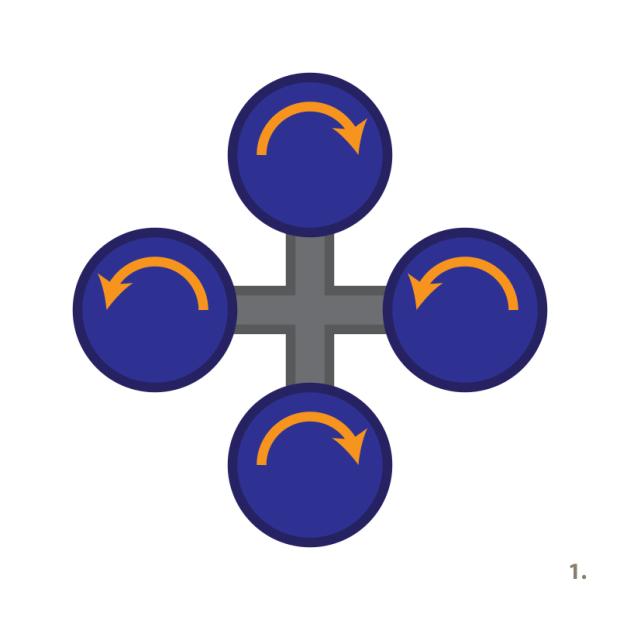



It is easy to see that lift is generated by the fans that propel the BELL NEXUS full-scale multirotor design, but how is fan operation coordinated in such a way as to enable smooth pitch, yaw and roll maneuvers in flight? The simplest perspective may be to view how the rotors on a simple 4-fan multirotor work. The full-scale BELL NEXUS operates on the same basic principles, although it has a far more sophisticated flight control system than an RC hobby vehicle. Illustration 1. shows a quadrotor in hover. The top (nose) and bottom (tail) fans are spinning clockwise, whereas the left and right fans are spinning counter-clockwise. Their speed is represented by the boldness of the arrows, which all the same. The opposing forces of the two sets of rotors cancel each other out and results in a stable hover with the vehicle remaining stationary in the pitch, roll and yaw axes.
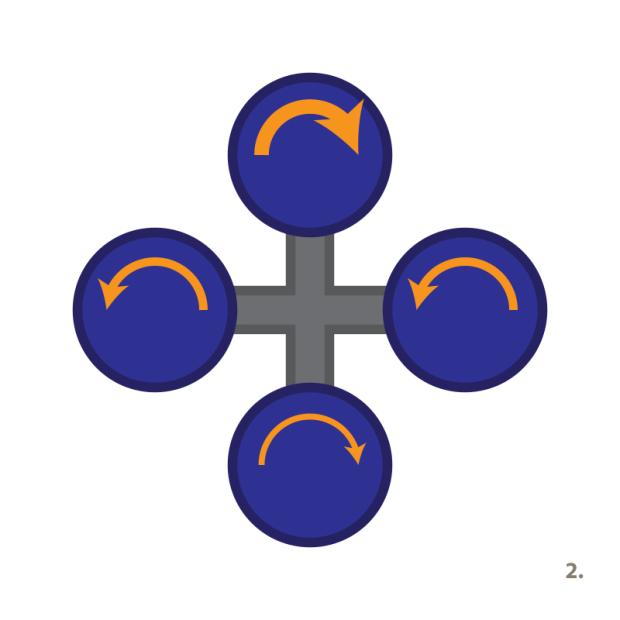
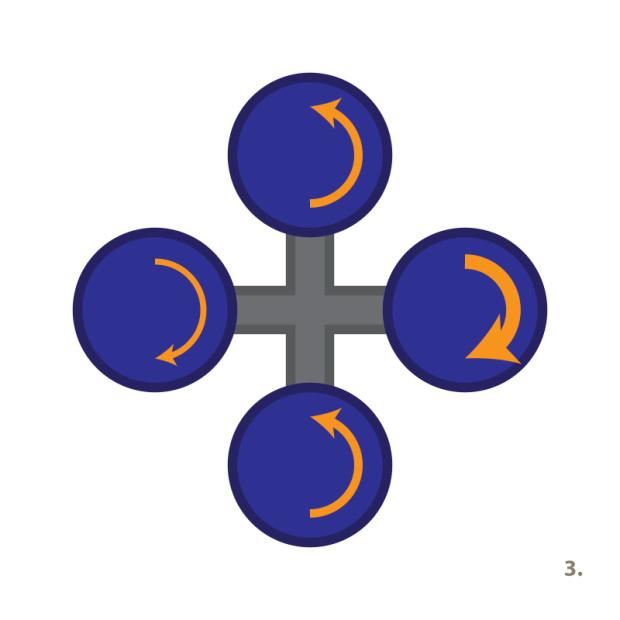
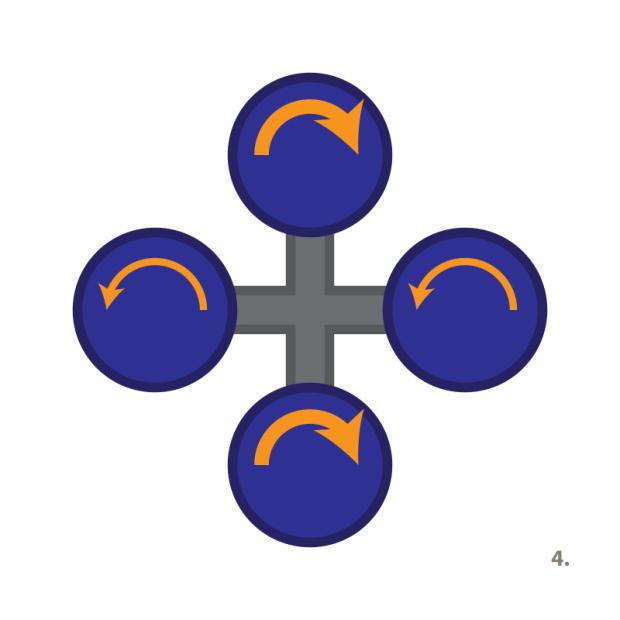
In Illustration 2., the quadrotor is pitching nose-up because the nose rotor is spinning at a higher rpm than the other fans. Similarly, Illustration 3. shows the quadrotor beginning a left roll. The 4th graphic shows two fans spinning clockwise at a higher rpm than two spinning counter-clockwise. This will cause the vehicle to yaw counter-clockwise in response to the higher speed fans spinning clockwise. These principles similarly apply to full-scale multirotor aircraft. Quadrotor flight control diagrams courtesy of Wikipedia.
The Parrot drone uses shrouded props, which improves aerodynamics and protects the operator from accidental prop strikes. Photo by Halftermeyer - Own work, CC BY-SA 3.0.
For details on the BELL NEXUS, see this video: “A deep dive into Bell’s Nexus eVTOL Air Taxi Aircraft of the Future – AINtv”