A Framework for a High-School Level Robotics Curriculum


The following framework for a high-school level robotics Curriculum was written by Bill Lovell, CEO and Senior Engineer at c-Link Systems, Copyright © 2012. c-Link has been producing robotic unmanned ground systems for disaster cleanup, landscaping, construction, surface and subterranean mining, and education under the Forager and Omnipanzer brands for many years, and has deployed robots at client sites worldwide. Bill holds degrees in electronic engineering, mechanical engineering and industrial engineering.
Introduction/Abstract
This document is intended to familiarize the reader with the 2nd phase of the creation and implementation of a robotic, Computer Integrated Manufacturing, Process controls course for high school level students. This phase is adjusted to the Oxford Hills Technical School (OHTS) but can be modified to fit most educational institutes.
Included within the document are links to the third party vendors.
Table of Contents
Introduction/Abstract ............................................................................ 3
Primary Focus ............................................................................................. 5
Project Reason ......................................................................................... 5
Impediments ................................................................................................ 5
The Epiphany ............................................................................................. 6
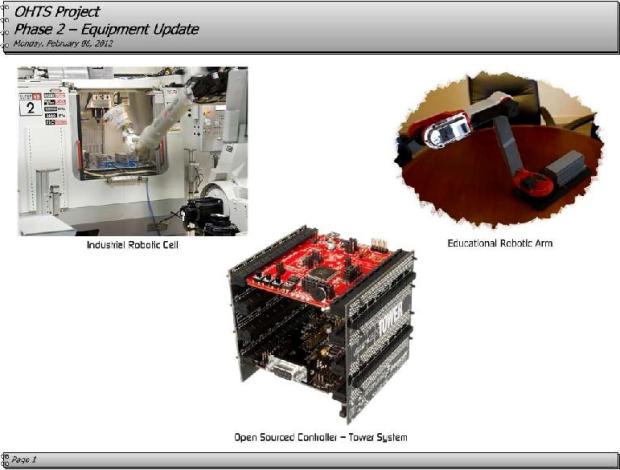
Phase 2 Equipment Update Plates .......................................... 7
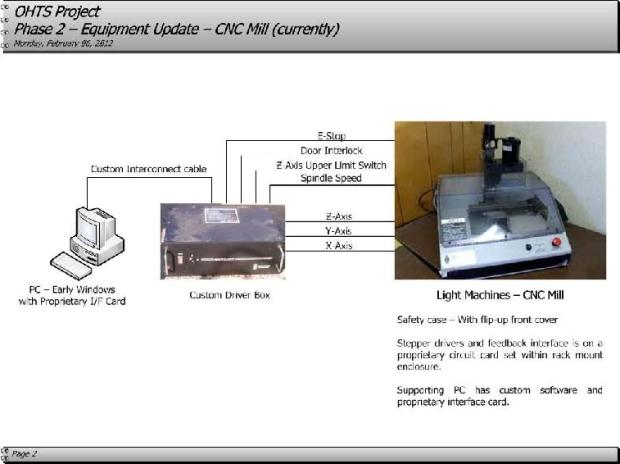
CNC Mill currently .................................................................................... 8
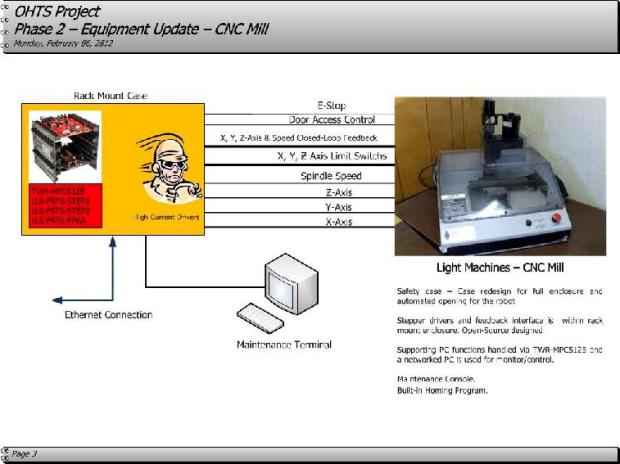
CNC Mill proposed ................................................................................. 9
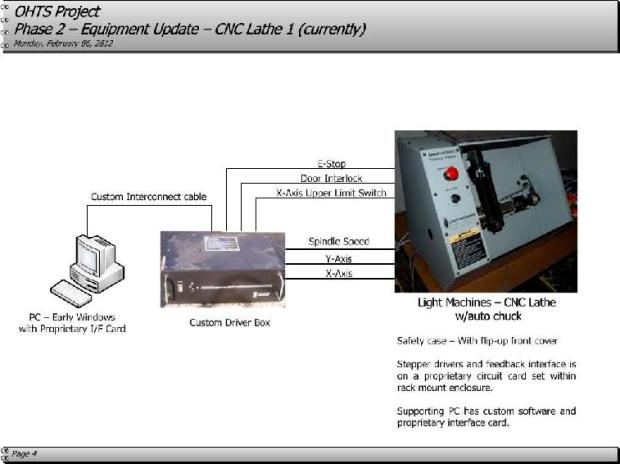
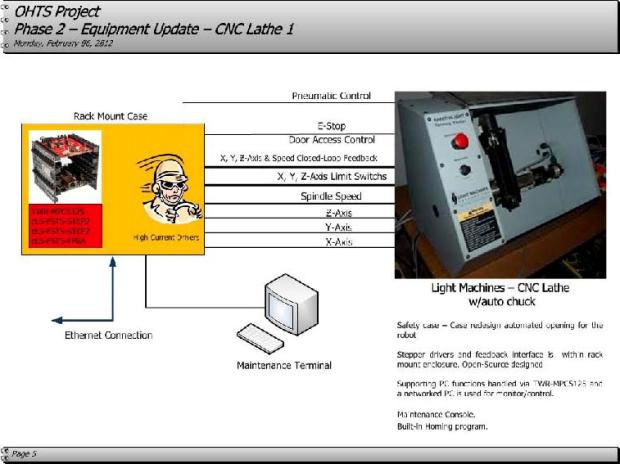
CNC Lathe 1 currently ........................................................................... 10
CNC Lathe 1 proposed ......................................................................... 11
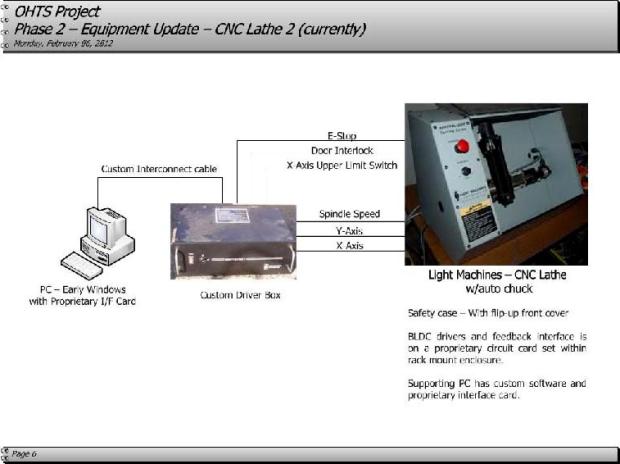
CNC Lathe 2 currently ........................................................................... 12
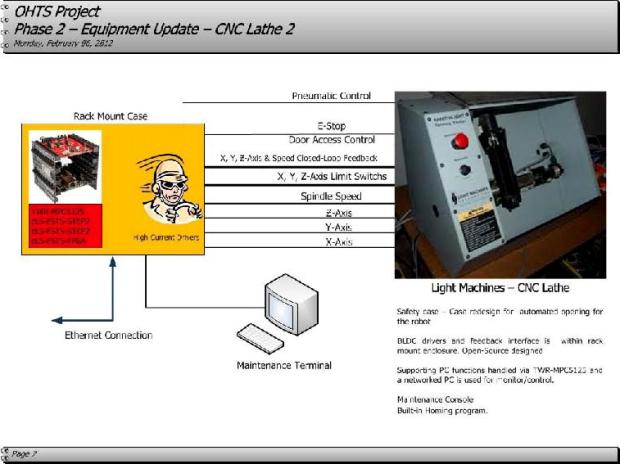
CNC Lathe 2 proposed ........................................................................... 13
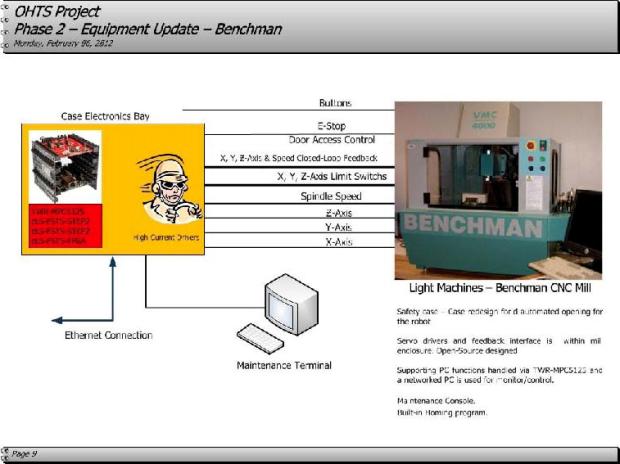
Benchman Mill currently ........................................................................ 14
Benchman Mill proposed ....................................................................... 15
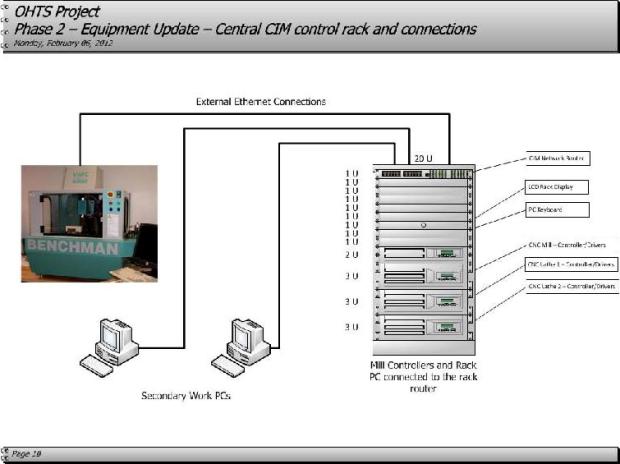
Central CIM control rack and connections proposed ... 16
Synopsis/Conclusion ................................................................................. 17
Corporate Brief ................................................................................................ 17
Reference Links............................................................................................... 18
Primary Focus
Project Reason
The creation of a curriculum in the robotics arena with all the secondary facets is but a meager portion of the encompassing picture. The lectures, text books and imagery conveys little without supporting equipment for actual hands-on experience. The add-ed program concept of a classroom factory equipped with machine cells and robots has energized the students.
Impediments
The OHTS project had the support of a myriad of equipment available. Being available is not the same as functioning or implemented system. As with many learning institutions the equipment was acquired years in the past and from a company “designed for educational purposes” that in actuality created a total propriety system. Issues with this concept are dependent on instructor/maintenance background, funding and the ability to upgrade. As with the case of OHTS the CNC (Computer Numerically Controlled) mills and lathes are primarily first generation. This brought a multitude of is-sues that actually put most equipment out of commission. Some of the issues were:
1. Age of equipment and the inconsistent preventative maintenance.
2. Components of each unit large and bulky by today’s standard.
3. Failed/non-repairable components.
4. Proprietary components.
5. Ineffectual documentation for repair and usage.
6. High cost of upgrade and/or yearly maintenance.
7. A need for PC interface card, proprietary
8. A PC with windows operating system (version 95/98)
9. The need for other custom software to interface between the human and the machine software.
10. Inability to interconnect via a network
11. Funding
This list could become a novella on its own. Suffice to say that this list portrays a rather vivid image.
The Epiphany
The primary function of c-Link Systems as an entity is the design and implementation of robots and their supporting sub products. Motor control systems abound within the cLS lab and production area. This generated the idea for total retrofit of all CNC equipment to the level surpassing what the designing vendor had in mind.
The overall requirements for driving this phase were:
1. Maximum number of units made operational.
2. Minimum budgetary impact.
3. Open Source or COTS (Commercial-off-the-shelf).
4. Low maintenance Operating System.
5. Low/No cost operating system and support software.
6. Student accessible for training.
7. Secondary function is Ethernet or other standard capable.
8. Tertiary function being the consolidation of all CNC standalone systems into one equipment rack.
The hardware selected allows for interchangeability in the case of a failure.
The following graphical plates depict the difference between what was the OEM con-figuration and the proposed configuration.
P. 7 (Please See Slides 1 – 10)
Synopsis/Conclusion
With an ever changing world of electronics and the economic world fluctuating systems and equipment cannot be dedicated to one narrow function. This phase change will bring longer life to the equipment of this educational institution and any other who uses the concept.
c-Link Systems is striving to maintain a low cost advanced platform to which additions and upgrades can be performed.
Corporate Brief
For the past seven years c-Link Systems, Inc. has focused on industrial control/automation of process lines in metal rolling and paper mills. Out of this emerged our expertise in Industrial Robotics and high speed fiber optic communications. A previous background in mechanics, dynamics and satellite guidance systems has positioned the company to support our customers in the growing field of robotics as it relates to autonomous robotic vehicles (ARV) with numerous commercial/industrial applications.—SEA
Links
TWR-MPC5125—MPC5125 MPU Industrial Networking, Automotive and HMI Module
TWR-MPC5125
Tower System— Overview
Tower System
c-Link Systems, Inc. Copyright 2012
220 Eddie Kahkonen Rd, Norway, ME 04268
Phone (207) 595-0198 • www.c-lnksystems.com